Portafolio de Actividades
Introduccion a Ing. Mecatrónica
Departamento de Ciencias e Ingenierías | Universidad Iberoamericana Puebla, México.
Controlar servomotores mediante arduino
Jesús Santiago Muñoz
Zaul Sanchez Ventura
- Resumen -
Se ha desarrollado un circuito para manejar servomotores a través de potenciómetros usando un Arduino Uno, donde se ha configurado el Arduino para que los servomotores reaccionaran al movimiento de los potenciómetros.
Después de eso se realizó el circuito físicamente uniendo los elementos necesarios como: Arduino, los servomotores, los potenciómetros y un protoboard. Una vez que todo estuviera bien conectado, se cargó el código en el Arduino logrando que los potenciómetros controlaran los servomotores de forma eficiente.
- Introducción -
En esta practica se realizaran diversos circuitos previamente armados en tinkercad, en donde mediante unos potenciómetros, se pueda controlar los servomotores, todo esto con ayuda de un Arduino Uno, para subir el código y poder realizar esta acción.
- Materiales -
- Protoboard
- Jumpers
- Servomotores
- Potenciómetros
- Arduino Uno
-Cable usb (Arduino)
- Desarrollo -
Se comenzó armando y simulando el circuito en Tinkercad, después de verificar la funcionalidad del circuito, se procedió al armado del circuito, en el cual se necesitaron los materiales previamente mencionados. Siguiendo el diseño previamente construido en Tinkercad, se empezó a realizar el armado del circuito en físico.
Una vez acabado el circuito, se cargó el código en el Arduino, que estaba diseñado para leer las entradas de los potenciómetros y controlar la posición de los servomotores. Luego, se conectó el Arduino a la computadora para que este pudiera hacer su función
Simulación
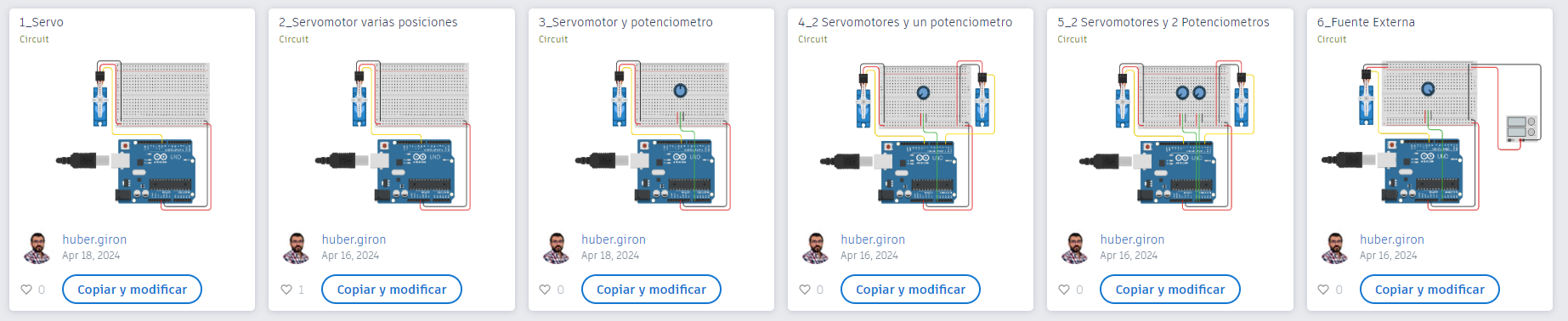
Para poder realizar las simulaciones de los circuitos, se necesitó la ayuda de la aplicación Tinkercad, ya que ahí podemos realizar los circuitos de forma digital, y así ponerlos a prueba realizando una simulación y verificar que no haya ningún error tanto en los códigos como en el armado de los circuitos.
Ejemplo:
Diseño
El diseño de los circuitos armados, como ya se menciono previamente, se realizo el diseño en la aplicación de Tinkercad
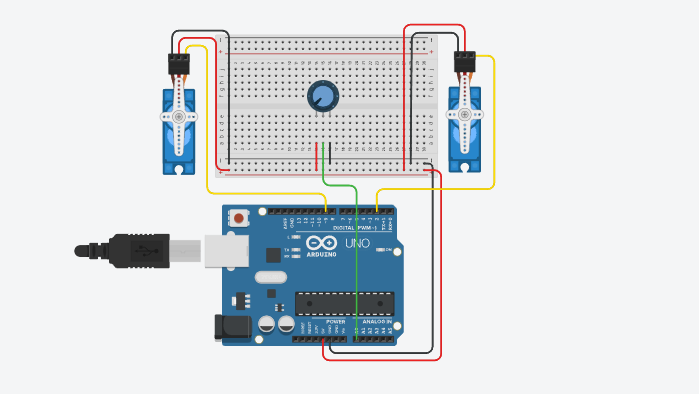
Construcción
La construcción de los circuitos nos basamos de la aplicación de Tinkercad y replicarlo en físico, esto con la finalidad de no tener ningún error al construir o conectar el circuito.
- Resultados -
Circuito 1: Mediante el código subido al Arduino, el circuito debe hacer un giro a 180 grados
Descargar el codigo fuente: Codigo Fuente
Circuito 2: Mediante el código de Arduino, ir cambiando los valores del giro para así controlar el servomotor y hacer que gire en la dirección deseada.
Descargar el codigo fuente: Codigo Fuente
Circuito 3: Controlar un servomotor con un potenciómetro.
Descargar el codigo fuente: Codigo Fuente
Circuito 4: Controlar 2 servomotores con un potenciómetro.
Descargar el codigo fuente: Codigo Fuente
Circuito 5: Controlas 2 servomotores con 2 potenciómetros, cada potenciómetro controla un servomotor.
Descargar el codigo fuente: Codigo Fuente
Circuito 6: Controlar un servomotor con un potenciómetro (Conectado a una fuente externa)
Descargar el codigo fuente: Codigo Fuente
- Conclusiones -
En conclusión, todas las prácticas realizadas cumplieron con los resultados esperados. Esto se logró gracias a las pruebas previas en Tinkercad, donde pudimos probar los circuitos virtualmente antes de armarlos físicamente. Esta etapa nos ayudó a identificar y corregir errores, lo que facilitó mucho el proceso de ensamblaje.
- Referencias -
https://www.ingenierizando.com/electronica/potenciometro/
https://www.ingmecafenix.com/electronica/motores-electronicos/servomotor/
- Descargables -
Descargar documento PDF: documento.pdf
Descargar codigo Arduino: codigo.ino
Descargar Archivo 3d .STL: pieza.stl